LDDMM: influence of control points location#
[1]:
import shutil
from pathlib import Path
import numpy as np
import pyvista as pv
from matplotlib import pyplot as plt
import polpo.lddmm as plddmm
from polpo.mesh.qoi import centroid2farthest_vertex, vertexwise_euclidean
from polpo.mesh.surface import PvSurface
from polpo.mesh.varifold.tuning import SigmaFromLengths
from polpo.plot.pyvista import RegisteredMeshesColoredPlotter
from polpo.preprocessing.load.pregnancy.deformetrica import get_two_random_meshes
[KeOps] Warning : CUDA was detected, but driver API could not be initialized. Switching to CPU only.
[2]:
RECOMPUTE = False
STATIC_VIZ = True
VIZ = 1
if STATIC_VIZ:
pv.set_jupyter_backend("static")
[3]:
STRUCT_NAME = "L_Hipp"
OUTPUTS_DIR = Path.home() / ".polpo/results" / f"lddmm_control_points_{STRUCT_NAME}"
REGISTRATION_DIR = OUTPUTS_DIR / "registration"
if OUTPUTS_DIR.exists() and RECOMPUTE:
shutil.rmtree(OUTPUTS_DIR)
[4]:
meshes = get_two_random_meshes(
OUTPUTS_DIR,
mesh_names=("source", "target"),
target_reduction=0,
)
[5]:
if VIZ > 1:
pl = pv.Plotter(border=False)
for mesh in meshes.values():
pl.add_mesh(mesh.as_pv(), show_edges=True, opacity=0.6)
pl.show()
We select the varifold kernel using characteristic lengths.
[6]:
sigma_search = SigmaFromLengths(
ratio_charlen_mesh=2.0,
ratio_charlen=0.25,
)
sigma_search.fit(meshes.values())
metric = sigma_search.optimal_metric_
sigma_search.sigma_
[6]:
np.float64(5.589180490389398)
Following LDDMM: how to register a mesh to a template?.
[7]:
registration_kwargs = dict(
kernel_width=4.0,
regularisation=1.0,
max_iter=2000,
freeze_control_points=False,
metric="varifold",
tol=1e-16,
attachment_kernel_width=sigma_search.sigma_,
)
fmt = "%0.6f"
delimiter = " "
registration_dirs = []
mesh_filenames = list(meshes.keys())
[8]:
registration_dir = REGISTRATION_DIR / "uniform"
registration_dirs.append(registration_dir)
if not registration_dir.exists():
# ~420 cps
plddmm.registration.estimate_registration(
mesh_filenames[0],
mesh_filenames[1],
output_dir=registration_dir,
**registration_kwargs,
)
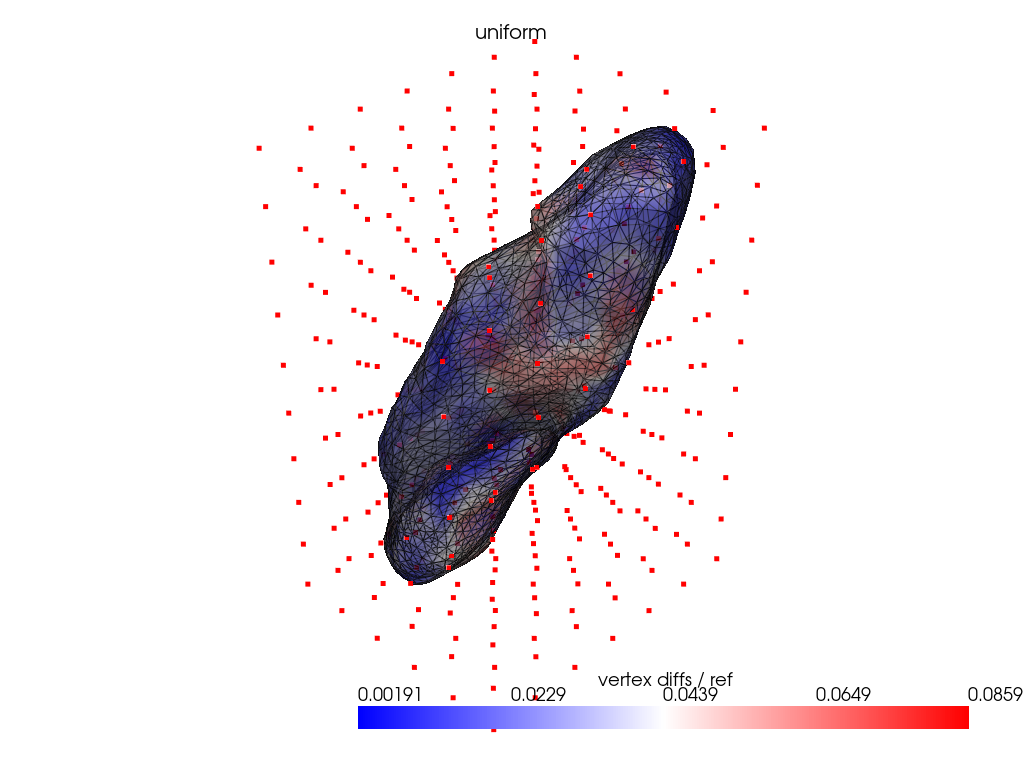
Using mesh vertices as control points.
[9]:
registration_dir = REGISTRATION_DIR / "vertices_full"
registration_dirs.append(registration_dir)
if not registration_dir.exists():
registration_dir.mkdir(parents=True, exist_ok=True)
cps_name = registration_dir / "ControlPoints.txt"
np.savetxt(
cps_name,
list(meshes.values())[0].vertices,
fmt=fmt,
delimiter=delimiter,
)
# ~1002 cps
plddmm.registration.estimate_registration(
mesh_filenames[0],
mesh_filenames[1],
output_dir=registration_dir,
initial_control_points=cps_name,
**registration_kwargs,
)
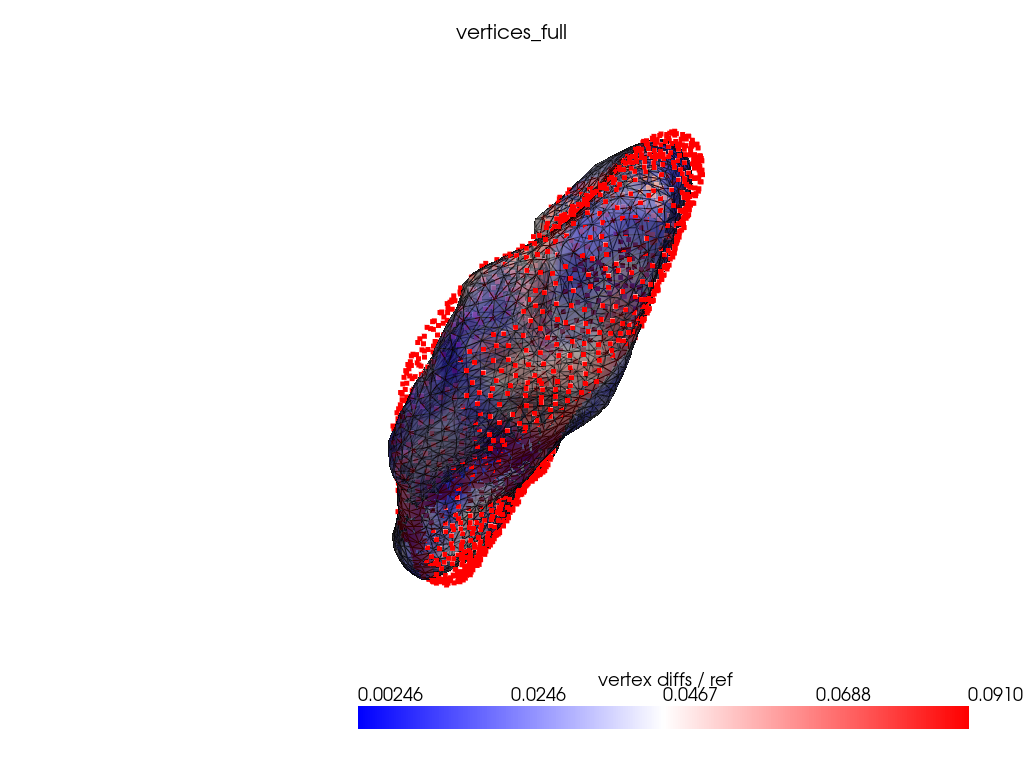
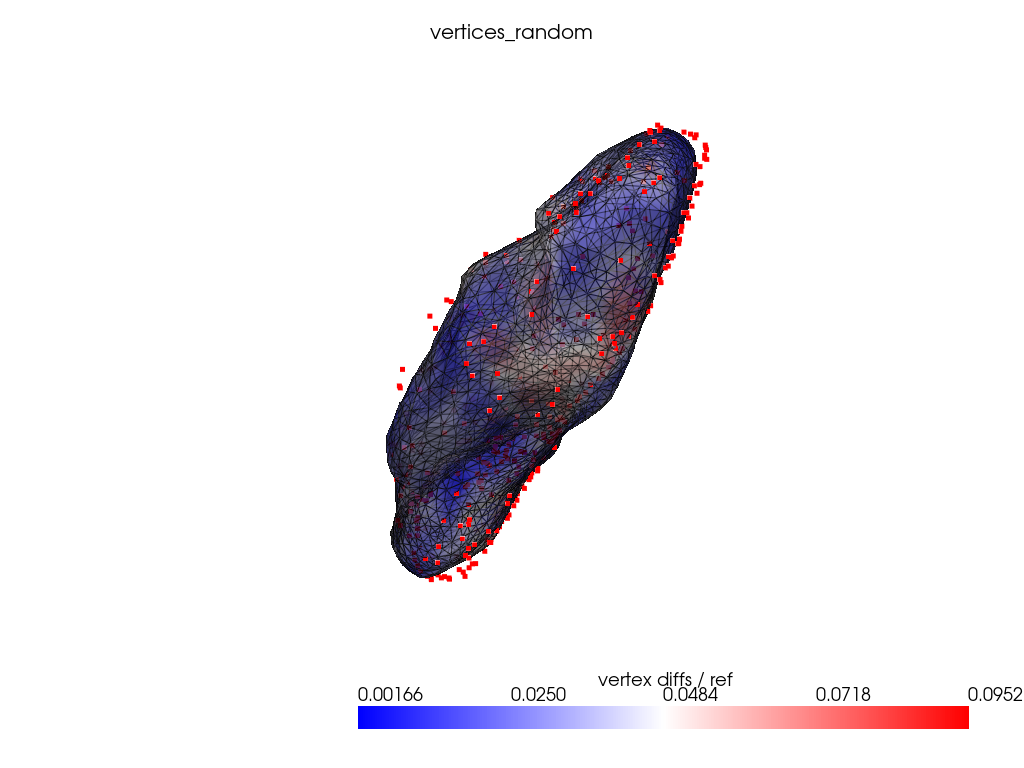
Using randomly sampled mesh vertices as control points.
[10]:
# TODO: use farthest point sampling?
# TODO: use curvature based selection
[11]:
registration_dir = REGISTRATION_DIR / "vertices_random"
registration_dirs.append(registration_dir)
if not registration_dir.exists():
registration_dir.mkdir(parents=True, exist_ok=True)
vertices = list(meshes.values())[0].vertices
cps_idx = np.random.choice(range(vertices.shape[0]), size=420, replace=False)
cps_name = registration_dir / "ControlPoints.txt"
np.savetxt(
cps_name,
vertices[cps_idx],
fmt=fmt,
delimiter=delimiter,
)
# ~420 cps
plddmm.registration.estimate_registration(
mesh_filenames[0],
mesh_filenames[1],
output_dir=registration_dir,
initial_control_points=cps_name,
**registration_kwargs,
)
Comparison#
[12]:
reconstructed = {}
cps = {}
for registration_dir in registration_dirs:
reconstructed[registration_dir.name] = PvSurface(
plddmm.io.load_deterministic_atlas_reconstruction(registration_dir, as_pv=True)
)
cps[registration_dir.name] = plddmm.io.load_cp(registration_dir)
[13]:
_, target = meshes.values()
{
name: metric.dist(target, reconstructed_)
for name, reconstructed_ in reconstructed.items()
}
[13]:
{'uniform': np.float64(3.8427535440006966),
'vertices_full': np.float64(3.9352090397352595),
'vertices_random': np.float64(4.156589211729441)}
[14]:
ref_dist = centroid2farthest_vertex([target])[0]
for name, reconstructed_ in reconstructed.items():
cps_ = cps[name]
pl = RegisteredMeshesColoredPlotter()
pl.add_meshes(
target.as_pv(),
reconstructed_.as_pv(),
ref_dist=ref_dist,
show_edges=True,
opacity=0.8,
name="vertex diffs / ref",
)
pl.add_title(name, font_size=8.0)
pl.add_points(pv.PolyData(cps_), color="red")
pl.show()
[15]:
_, ax = plt.subplots()
for name, reconstructed_ in reconstructed.items():
vals = vertexwise_euclidean(target, reconstructed_) / ref_dist
ax.hist(
vals,
weights=1 / len(vals) * np.ones_like(vals),
label=name,
alpha=0.6,
)
ax.set_xlabel("Vertexwise euclidean distances / Ref dist")
ax.set_ylabel("Frequency")
ax.legend(bbox_to_anchor=(1.02, 1), loc="upper left");
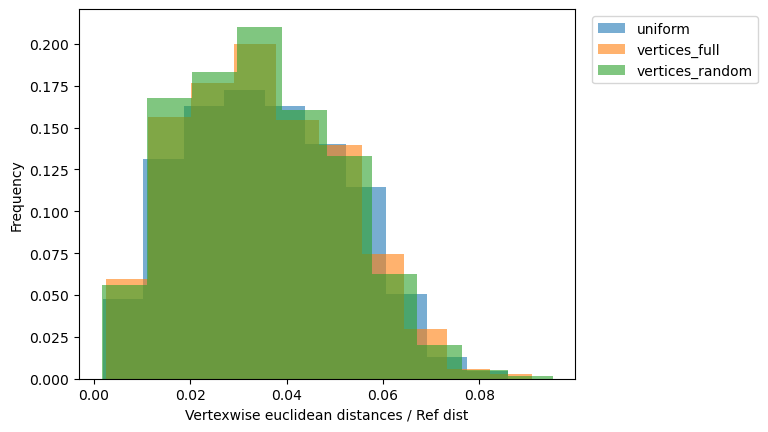
Conclusion: uniform grid is at least as good as other naive control points selection strategy.